2025.07.23
初学者向けヒューマノイドロボット開発プラットフォーム BaseNoid
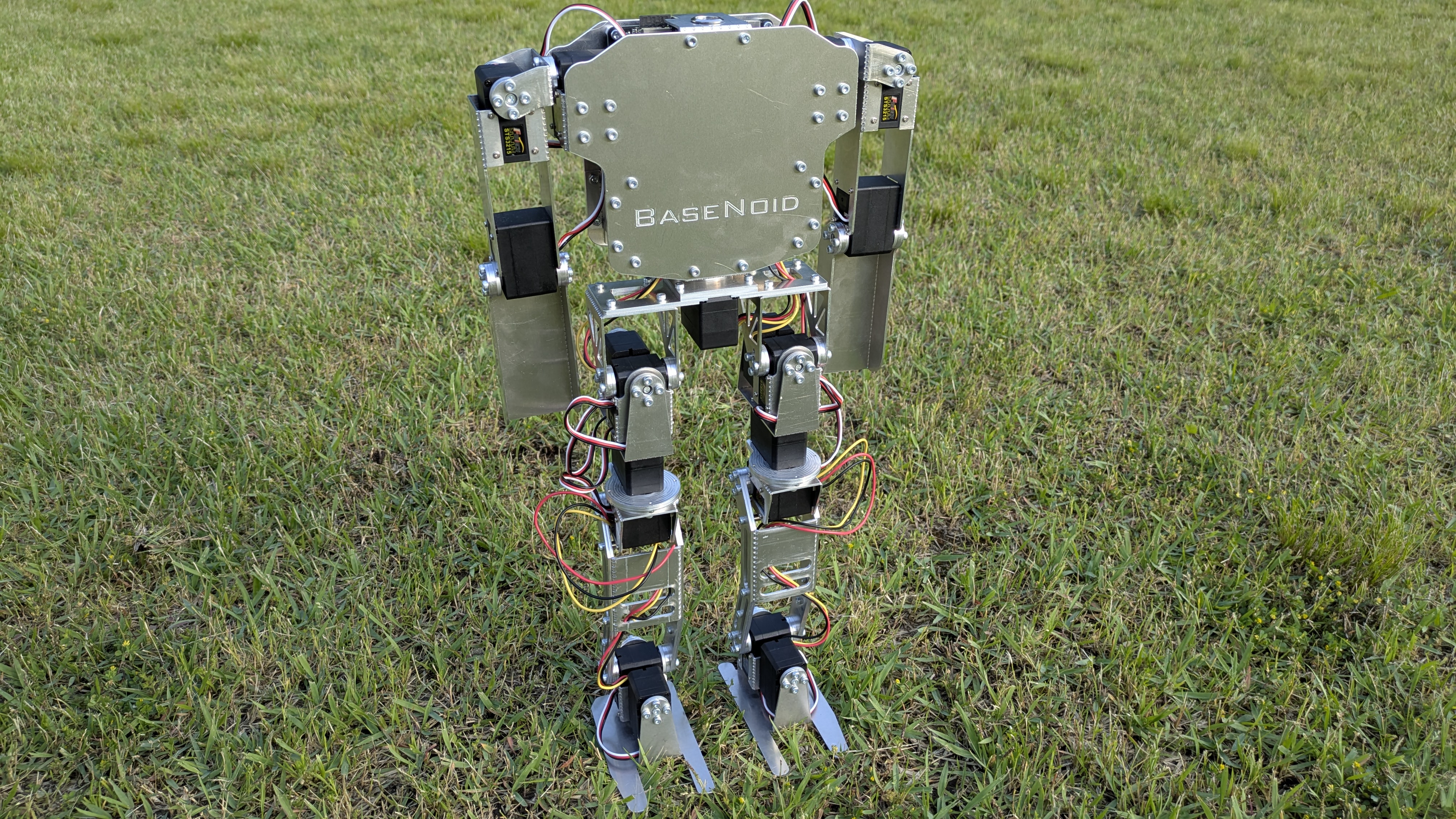
ヒューマノイド開発プラットフォーム BaseNoid
BaseNoidは,初めてヒューマノイド製作を志す初学者が,ヒューマノイドの機械,回路,制御を一通り扱えるようになるためのプラットフォームとして開発された,教育用ロボットです.フィギュアの素体に着想を得て,以下の要件を満たすように開発しています.
- 安価に作成できること
- 製作者が容易に改造しやすいよう,脚部や腕部,胴部などが簡単に分離できる構造となっていること
- シリアルサーボモータやIMUなどの構成部品を使用することで,本格的なヒューマノイド制御理論を体験可能であること
- 部品はロボット技術研究会が所有するCNCフライスとベンダーのみで作成でき,旋盤など,製作者の経験が必要な工作機械は使用しないこと
- ロボット技術研究会の新入生が,短期間で製作できること
BaseNoidの3D CAD
BaseNoidの3D CADは,以下のGitHubリポジトリにて公開されています.
 GitHubリポジトリ - BaseNoid
GitHubリポジトリ - BaseNoid
BaseNoidの制御回路
BaseNoidでは,制御用基板としてACT Base Circuit(以下,ABC)という,ロボット技術研究会ACTで開発している多軸ロボット向け制御基板を用いています.
ABCを使用しない場合は,秋月電子通商様のSTS3215商品ページ内で紹介されている参考資料の7ページ目をご確認の上,ご自分で回路を実装していただけましたら幸いです.
ABCは,以下のGitHubリポジトリにて公開されています.
※ ABCは現在,β版の状態です.動作不良の可能性がありますので,ご了承ください.
BaseNoidのサンプルプログラム
Platform IO上でArduino Frameworkを用いて
BaseNoidを制御するためのプログラムを開発しています.
サンプルプログラムは,以下のGitHubリポジトリにて公開予定です.
※ 開発中のサンプルプログラムが欲しい方は,お知らせください.